

Souhrn
Samozřejmě, že nedílnou součástí aplikace robotizačních postupů je dynamický rozvoj nových zobrazovacích technik, které mají zjednodušit orientaci operatéra a zvláště zpřesnit aplikaci během provádění katetrizační ablace tak, aby se tento zákrok co nejvíce přiblížil možnostem kardiochirurga během operace na otevřeném srdci či při torakoskopických výkonech; tj. vyvinout zobrazovací techniky s možností trojrozměrného zobrazení, které také odpovídají přesným anatomickým rozhraním srdečních oddílů nebo umožnit i přímou vizualizaci během takového katetrizačního zákroku.
Přesnější orientace v poměrně komplikované anatomii zvláště levé síně umožňuje docílit vyšší bezpečnost výkonu. Představujeme jednak robotizační techniky srdeční katetrizace, které se používají v klinické praxi, ale zároveň i ty, které probíhají preklinickým zkoušením a představují tak novou platformu pro možné další využití snad nejenom v podmínkách nefarmakologické léčby srdečních arytmií, ale pro další možné intervenční postupy v rámci intervenční kardiologie.
Summary
Neužil, P., Táborský M., Škoda, J., Petrů, J., Šedivá, L. Use of robotization procedures in catheterization ablations
In this review we discussed new approaches in developement of the catheter ablation in respect to the most common indication, i. e. curative treatment of the atrial fibrillation. Because of this very dymamic process the new imagine technigues are developed with the capability of the three-dimension visualisation of the cardiac structures so better orientation in relatively complicated left atrial anatomy could be achieved with respect to safety of the patients. We also described new and revolutionary robot-assist technigues of cardiac catheterisation which are already clinically applied. This robot-assisted technigues represents new platform for the non-farmacological treatment of the cardiac arrhythmias but for all interventional cardiology as well.
Roboticky asistované katetrizační intervence zcela jistě nevznikly jako prosté kopie chirurgicky prováděných robotizačních zákroků, které našly již celou řadu aplikací jak ve všeobecné chirurgii, tak ve specializovaných aplikacích. Původním impulsem k provádění takových zákroků byla spíše poptávka vojenského a kosmického výzkumu. Je možné si představit provedení výkonu „na dálku“, tj. bez přítomnosti špičkového medicínského týmu (vojenské nebo kosmické mise). Proto také ve vývoji hrála velkou roli americká NASA (National Aeronautics and Space Administration).
Vrcholem tohoto procesu bylo zavedení robotizační chirurgie do klinické praxe koncem 90. let a provedení prvního kardiochirurgického zákroku v roce 2000. Nicméně jistě není nezajímavé, že tato původní myšlenka není již nadále hlavním motorem rozvoje chirurgických aplikací robotizačních technik, ale je to především vyšší bezpečnost a přesnost její vlastní aplikace (v USA jsou velmi rozšířené např. robotizační výkony v gynekologii). V kardiochirurgii však aplikace robotizačních postupů nedosáhla takového všeobecného uplatnění, jejich aplikace v rámci cévní chirurgie se jeví jako výhodnější alternativa endoskopických zákroků a lze jednoznačně říci, že Česká republika představuje vrchol právě při její aplikaci v cévní chirurgii.
Jiná situace vznikla v souvislosti s prováděním katetrizačních ablací srdečních arytmií a především s výrazným rozšířením abVyužitílace na všechny formy fibrilace síní. Šlo o možnost provést výkon co nejefektivněji a zároveň co nejbezpečněji pro nemocného. Tyto požadavky předurčují vývoj a následnou klinickou aplikaci robotizačních postupů; samozřejmě by optimální byl vývoj systému s „širším“ použitím, a nikoliv pouze systém na izolované zákroky u nemocných s fibrilací síní.
V souvislosti s požadavkem přesnějších a efektivnějších zákroků, pro pacienta bezpečnějších a s cílem zkrácení doby pobytu v nemocnici, se tyto techniky i nadále zdokonalují a koncem tohoto desetiletí budeme patrně svědky jejich dramatického rozvoje, který je také diktován snahou o minimalizaci používání rentgenového záření s možností provádění srdečních intervencí pod kontrolou magnetické rezonance, což samo o sobě vyžaduje dálkově ovladatelné katetrizační instrumentárium.
Zobrazovací a mapovací techniky
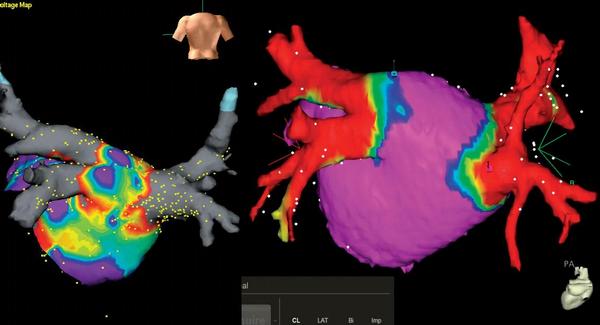
Pro vývoj robotizačních systémů především v intervenční kardiologii a srdeční elektrofyziologii jsou velmi důležité zobrazovací techniky. To, co pro chirurga znamená endoskopická vizualizace (reálný trojrozměrný obraz), je v intervenčních katetrizačních technikách prakticky nedostupné. Dlouhou dobu dominovala rentgenová skiaskopie a také kontrastní angiografie věnčitých tepen je stále považována za zlatý standard ve vyšetřování věnčitých tepen. To již dlouhou dobu neplatí pro srdeční elektrofyziologii. V rámci vývoje zobrazovacích a mapovacích systémů se v posledním desetiletí vyvinuly technologie umožňující trojrozměrné (3D) zobrazení. Největšího rozšíření doznaly především dva systémy: CARTO® firmy Biosense Webster a NavX® vyvinutý firmou Endocardiac Solution Inc. (dnes je součástí St. Jude Medical). V rámci dosažení dokonalé představy v trojrozměrném prostoru je využívána integrace výše uvedených mapovacích systémů s 3D zobrazením rekonstruovaným buď s využitím scanů víceřádkové (16 nebo 64) počítačové tomografie, nebo magnetické rezonance(1, 2, 3) (Obr. 1).
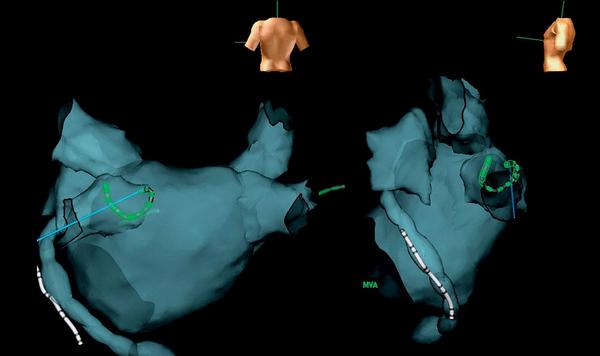
Firma Biosense Webster před dvěma lety přišla s prvním komerčně dostupným systémem integrace obrazové 3D rekonstrukce představovaným softwarovým produktem CARTO Merge, u kterého je možné poměrně jednoduchou cestou nejdříve segmentovat jednotlivé řezy CT či MR, a tím rekonstruovat 3D rozměr, následně tento obraz registrovat podle několika zvolených topografických markerů s mapovaným srdečním oddílem a dál již pak k zobrazení katétru využívat „virtuální“ 3D skelet MR či CT zobrazení (Obr. 2).
V současné době již dokončená verze CARTO 3 umožňuje zobrazení i ostatních zavedených katétrů, které nejsou opatřeny magnetickým senzorem. Je to umožněno kombinací s impedanční metodou detekce voltážového gradientu (prakticky stejný princip jako u systému NavX). Je také umožněno vytváření anatomického 3D skeletu ve zkráceném čase (tzv. FAM - fast anatomical mapping).
V poslední době vzniká potřeba eliminovat „chybu“, která vzniká během procesu integrace virtuálního, „předem připraveného“ 3D zobrazení srdečních oddílů, je možné využít rekonstrukce oddílů v 3D konfiguraci při použití ultrarychlé rotace běžného angiografického přístroje (vyvíjejí především firmy Philips a Siemens).
V úvodu výkonu se již na elektrofyziologickém sále provede nástřik vysokotlakým injektorem a provede se segmentace s rekonstrukcí v 3D obraze; odpadá tak nutnost ověřování polohy nemocného a integrace fúzí datových souborů s elektroanatomickým mapovacím systémem. Na našem pracovišti máme zkušenost cca půl roku s ověřováním klinické aplikace 3D systémem Dyna CT firmy Siemens (Obr. 3).
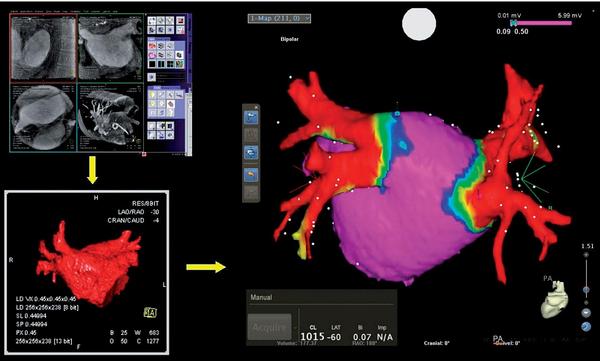
U první skupiny cca 30 nemocných se podařilo zdokonalit techniku Dyna CT natolik, že je možné 3D rekonstrukce levé síně již použít pro magnetickou navigaci (Niobe) s využitím CARTO RMT. S možností integrace 3D mapování vyvstává také otázka, který z obou systémů (CT či MR) je pro zvolený postup integrovaného zobrazení výhodnější. Jistou výhodou CT je jeho rychlost a rozlišitelnost, nevýhodou pak radiační zátěž (u 64řádkového systému vzrůstá téměř na dvojnásobek oproti 16řádkovému systému a paradoxem je obecné podceňování radiační zátěže při provádění CT).
Výhodou MR je časová rozlišitelnost a detailnější informace o charakteru tkání, nevýhodou pak nemožnost vyšetření nemocných s implantáty, zvláště pak s kardiostimulátory a defibrilátory. Navzájem fúzované obrazy pak umožňují zobrazovat pohyb katétru s minimálním použitím rentgenové skiaskopie v reálném čase. Tato technika se již delší dobu využívá při neurochirurgických stereotaktických intervencích, v případě výkonů prováděných v rámci elektrofyziologických intervencí je limitací nejenom pohyb srdce, ale i pohyb bránice během dýchání, a to jak kraniální a kaudální, tak i anteroposteriorní.
Proto je pro další vývoj nutné využít možností zobrazování 3D v reálném čase, což například může nabídnout intervenční magnetická rezonance. V bližším výhledu je reálná 3D aplikace intrakardiálního ultrazvuku, který umožňuje taktéž bez rentgenové zátěže získávat nejenom informace o poloze katétru, ale i o charakteru aplikace ablační energie (radiofrekvenční, laseru, kryoenergii); na vývoji jeho 3D aplikace v současné době intenzívně pracuje právě firma Biosense Webster, která vývoj tohoto produktu převzala od firmy Acuson - Siemens.
3D zobrazení je tedy možné využít nejenom pro vyšší efektivitu zákroku, ale i pro jeho vyšší bezpečnost; docílíme kvalitativně lepšího znázornění levé síně, jsme schopni určit místo, kde je vlastní ústí plicní síně nebo vzdálenější oblast antra,(4) abychom se tak mohli vyvarovat aplikace uvnitř plicních žil s rizikem velmi vážné komplikace tohoto výkonu, kterým je stenóza plicní žíly. Mezi další nejčastější možné komplikace patří perforace srdeční stěny (informace o kontaktu a orientaci katétru během provádění ablace) a tromboembolické komplikace (kromě úrovně antikoagulace je důležitá technologie ablačního katétru). CT, MR i ICE zobrazení umožňuje získat informaci o poloze okolních struktur včetně jícnu, který ve variantních směrech naléhá přímo na zadní stěnu levé síně.(5, 6)
Robotizační techniky
V současné době se dá již hovořit o rozvinuté klinické aplikaci robotizačních technologií v intervenční kardiologii a intervenční srdeční elektrofyziologii tak, jak je známe z chirurgických robotiObr. systémů (da Vinci® firmy Intuitive Surgical Inc).(7) Ve fázi klinických aplikací či klinického a preklinického zkoušení jsou celkem tři systémy, z nichž nejdále je systém elektromagnetické navigace Niobe® firmy Stereotaxis Inc. a systém Sensei® firmy Hansen Medical Inc. Již na přelomu tisíciletí byl v experimentu poprvé úspěšně použit systém Telstar® od stejné firmy, který používal k navigaci tří elektromagnetů chlazených tekutým héliem spolu s biplanárním angiografickým přístrojem.
Výsledný vektor magnetického pole, který určoval směr posunu katétrů, se zobrazoval na obrazovce angiografického systému. Posun katétrů v magnetickém poli je umožněn umístěním mikromagnetů na konec katétru či drátěného vodiče, který je dostačující, aby měnil svoji orientaci podle změny výsledného vektoru magnetického pole. Intenzita magnetického pole představovala u tohoto systému 0,15 T. V prvním souhrnném sdělení Faddis popsal výsledky u 11 zvířat, kdy bylo možné úspěšně dosáhnout všech definovaných cílů - srdečních struktur, jako jsou plicní žíly, koronární sinus, u 5 zvířat pak byla provedena i úspěšná katetrizační ablace.(8)
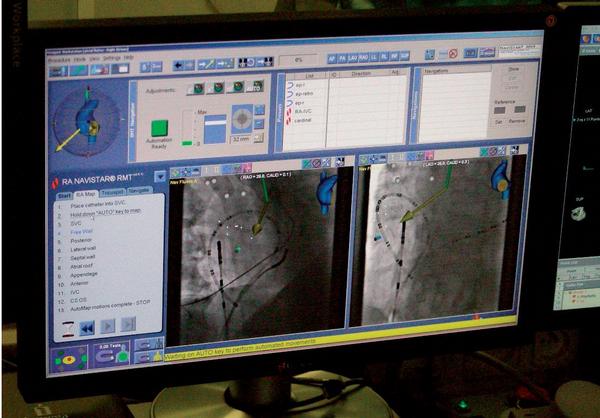
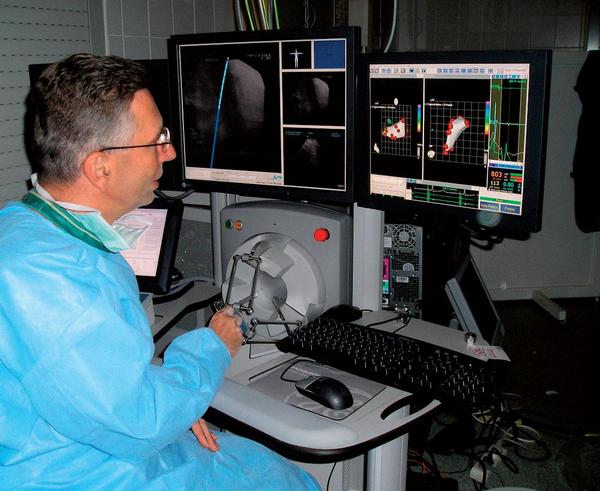
Autoři dále zkoumali úroveň kontaktu katétru se srdeční stěnou. Pozdější verze magnetické navigace Niobe firmy Stereotaxis již využívá k navigaci aplikaci dvou permanentních magnetů, které jsou umístěny protilehle podél hrudníku vyšetřovaného (Obr. 4) a navzájem koordinovanou rotací umožňují změnu orientace vektoru magnetického pole. Všechny tyto manipulace provádí katetrizátor z ovládacího místa na dálku (Obr. 5).


Výhodou systému Niobe je velká flexibilita katétrů, a tedy minimální riziko traumatizace srdečních struktur (např. perforace), ale zároveň je umožněna díky aplikaci magnetu vysoká stabilita katétru i během probíhajících tachyarytmií. Právě změna systému použitých magnetů (výměna elektromagnetů za permanentní magnet) umožnila kompatibilní použití systému Niobe se systémem elektroanatomického 3D mapování CARTO; lze samozřejmě používat i zobrazovací jednotku NavX. Se systémem CARTO je synchronizován natolik, že se řídící vektory zobrazují nejenom na obrazovce NAVIGANTu hlavní obrazovka systému NIOBE), ale jsou transferovatelné i do elektroanatomické mapy systému CARTO a elektroanatomická mapa se znázorňuje díky dokonalé synchronizaci obou systémů také na obrazovce NAVIGANTu, včetně její integrace do obrysů skiagrafického obrazu (Obr. 6).
K navádění katétrů a vodičů je možné využívat řady podpůrných systémů, které umožní například použít jakýkoliv bod 3D rekonstrukce elektroanatomické mapy CARTO systému a každý bod pak použít k opětovnému navrácení katétru do požadované oblasti (systém totiž využívá v paměti uložených patřičných vektorů, odpovídajících směřování a poloze katétru v daném místě srdeční stěny). Katétr pro magnetickou navigaci je velmi flexibilní a má měkké zakončení (charakteru vařené špagety), takže jeho pohyb v srdečních dutinách není rizikový z hlediska možné perforace srdeční stěny.
Doposud jsou k dispozici katétry se 4 a 8mm zakončením (distální elektrodou), aplikace pro pacienty s fibrilací síní není příliš optimální, od roku 2008 je k dispozici Thermocool RMT katétr -chlazený katétr (katétr proplachovaný fyziologickým roztokem), kterým je možné dosáhnout efektivnější transmurální léze, což je zvlášť důležité při katetrizační ablaci fibrilace síní a ovlivnění substrátu komorových tachykardií vycházejících z levé komory u nemocných po prodělaném infarktu myokardu.(8, 9) Přestože jde o systém, který je dnes využíván ve 120 centrech po celém světě a byl instalován především pro potřeby srdeční elektrofyziologie, je pro svoji vysokou univerzálnost (ta ho odlišuje od dvou jeho největších rivalů) čím dál tím častěji využíván intervenčními kardiology.
Další významnou aplikací je možnost použít magnetické navigace k zavádění elektrod pro levokomorovou stimulaci věnčitými žilami. Systém využívá opakovaného nástřiku žíly kontrastní látkou a podobně jako při provádění koronárních intervencí si vytváříme tzv. road map - tedy cestu složenou z jednotlivých úseků, kdy pro zaváděný vodič měníme úhel a orientaci požadovaného vektoru magnetického pole.
Na našem pracovišti jsme doposud provedli 67 výkonů s podporou systému Niobe (55 katetrizačních mapovacích a ablačních zákroků a u 12 nemocných jsme zaváděli s pomocí navigace elektrodu pro biventrikulární stimulaci). Druhým, pro klinické použití ve státech Evropské unie právě schváleným systémem dálkově řízené katetrizace je zařízení Sensei® firmy Hansen Medical Inc. (Obr. 7).

Přestože v Evropě má certifikát „CE“ pro provádění komplexních dálkově řízených výkonů - katetrizační ablace, v USA je ho možné využít pouze k mapování a nikoliv pro vlastní terapeutický zákrok. Systém je odvozen od elektromechanického robotizačního systému „da Vinci“, určeného pro chirurgické robotizační operační zákroky. Systém Sensei se skládá z řídící konzole, která ovládá mechanické rameno, ve kterém jsou mechanicky řiditelné dva převlečné zavaděče s největším rozměrem 14F (Obr. 8).

Je pohyb zavaděče vpřed a vzad, vnější zavaděč má možnost pouze anteriorní flexe. Vnitřní zavaděč je možné také nezávisle posunovat vpřed a vzad, navíc má možnost jak flexe, tak i rotace ve všech stupních volnosti. Rotace vnitřního zavaděče je umožněna nezávislým tahem 4 drátěných vodičů, které jsou navíjeny rotorem na cívkách a jsou umístěné v každém kvadrantu zavaděče. Tím je umožněna angulace zavaděče o 360°. Externí zavaděč je tažen dvěma drátěnými vodiči, takže umožňuje jednosměrnou flexi a pohyb vpřed a vzad. Veškeré rotační pohyby jsou umožněny „joystickem“, který ovládá pohyb zavaděčů v 3D rozměru. Ve spojení se systémem Sensei je pro mapování a ablaci možné využívat jakýchkoliv katétrů, které běžně používáme k manuálně prováděným výkonům (madel katétru se katetrizující během zákroku nedotýká, a tedy ani není nutné používat jejich směrového ovládání) (Obr. 9).
Jednou z limitací pro operatéra při použití tohoto robotizačního systému však může být fakt, že během zákroku ztrácí informaci o mechanickém kontaktu s tkáněmi (o kvalitě kontaktu vypovídá charakter intrakardiálního signálu), proto je nově systém vybaven informací o síle vyvíjené na srdeční stěnu (force control), kontinuálně se zobrazující na obrazovce. Stabilizací katétru je ve většině případů dosahován extrémně dobrý kontakt se srdeční stěnou, což je nutné zohlednit vlastní aplikaci radiofrekvenční energie. Aplikace v rámci provádění klinických terapeutických zákroků v pravé a levé síni byla zkoušena během studie REMOTE II, jejíž výsledky budou v nejbližší době publikovány.
Systém Sensei zatím nepodporuje katetrizační zákroky v komorách, nicméně svojí flexibilitou a dalšími možnostmi uplatnění naznačuje další směr a perspektivy vývoje dálkově řízené katetrizační techniky. Cílem by opět mělo být snazší a bezpečnější provádění katetrizačních ablací, zvláště pak ablace fibrilace síní. Při použití na našem pracovišti jsme docílili výrazného zkrácení použití rentgenové skiaskopie, systém je využíván především ke katetrizační ablaci pro fibrilaci síní. Nedávno publikovaná významnější práce z jednoho pracoviště srovnává běžné výkony s robotickým systémem Sensei u skupiny 390 konsekutivních nemocných, kteří byli randomizováni k manuální katetrizační ablaci (n = 197) a robotizačnímu výkonu (n = 193). Úspěšnost robotizačního zákroku byla 85 % oproti 81 % klasickým přístupem (p < 0,26).
Autoři prokazují signifikantně kratší dobu rtg skiaskopie.(10) Jsou samozřejmě publikovány i komplikace, kdy nejčastěji jde o perforaci srdeční stěny, nikoliv během mechanického pohybu, ale během aplikace radiofrekvenční energie. Vývoj atrioezofageální píštěle ještě nebyl popsán. Je však podstatné zdůraznit možnost integrace 3D rekonstrukce systémem NavX, protože robotický systém pak intuitivně využívá tento trojrozměrný obraz k navigaci katétru a to operatérovi umožňuje minimalizovat nutnost použití rtg.(11) Remote Navigation System (RNS, NaviCath, Haifa, Israel) - robotizační systém navigující pohyb katétrů jak dopředu, tak i rotační - ovládá pohyb i ultratenkého vodiče zavádějícího angioplastický katétr joystickem a po malých krocích také dotykovou obrazovkou.
První feasibility studie byla provedena u 18 nemocných,(12) přičemž úspěšného proniknutí stenózou bylo dosaženo u 17 pacientů, technicky příznivého efektu (dilatace zúženého místa a implantace stentu) bylo dosaženo u 15 nemocných. Přitom u deseti nemocných byla provedena direktní implantace stentu, přičemž čas zavedení stentu ani celkový čas rentgenové skiaskopie se nelišily statisticky významně proti kontrolní skupině (20 nemocných).
V tomto roce byly také poprvé publikovány výsledky z experimentu s využitím nového systému pod označením CGCI vyvinukatetrizačních tého firmou Magnetecs.(13) Jde o systém celkem osmi elektromagnetů, které vyvinou intenzitu magnetického pole 0,1-0,2 T (systém Niobe operuje s permanentními magnety, které mění polohu mechanickými převody a vyvinou intenzitu magnetického pole 0,08-0,1 T, viz výše) (Obr. 10).

Systém vytváření proměnlivého elektromagnetického pole má ještě tu výhodu, že umožňuje nejenom ohyb katétru, ale je možné provádět i jeho rotaci podél dlouhé osy a je možné zvolit typ kontaktu se srdeční stěnou (Obr. 11).
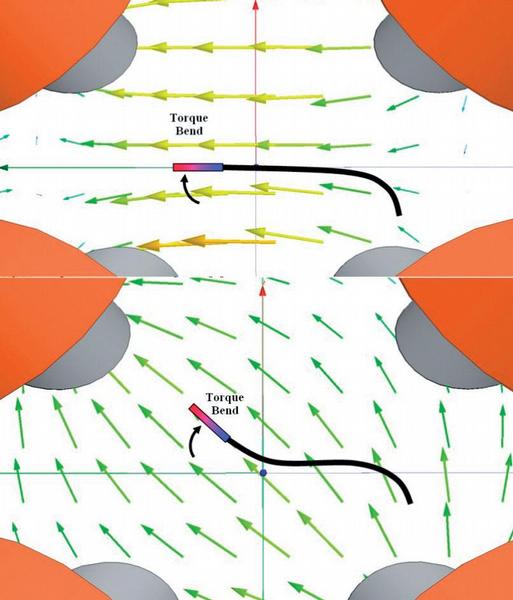
Stejně jako systém mechanického robotizačního postupu umožní velmi rychlou odpověď na operaObr. určenou změnu orientace a směřování katétru. To je opět u systému Niobe nevýhodou - dlouhá prodleva mezi zvoleným směřováním vektoru magnetického pole a vlastním provedením změny. Nicméně je zachována výhoda naprosto atraumatického „měkkého“ konce katétru (obdobně jako u systému Niobe). Vzhledem k současnému vývoji ve spolupráci se systémem NavX bude tato navigace umožňovat operatérovi zvolit jako cíl konečné polohy katétru jakékoliv místo (bod) na trojrozměrné rekonstrukci elektroanatomické mapy a systém umožní automatické „doručení“ konce katétru na vyžadované místo. S první aplikací v klinické praxi se počítá počátkem roku 2010.
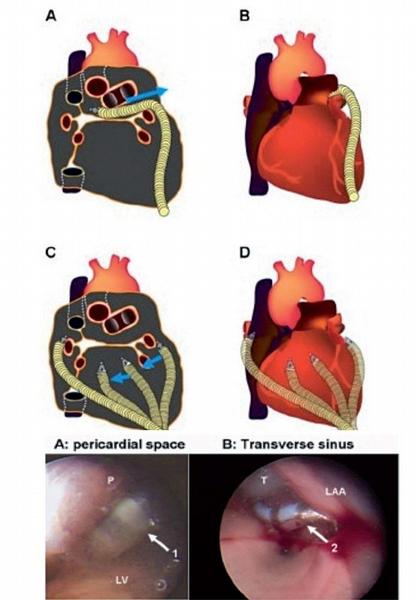
Další novinku v robotizačních aplikacích přináší firma CardioRobotics, která se zaměřila na vývoj systému epikardiální aplikace katetrizačních ablací. Jelikož systém počítá s přímou vizualizací (endoskopicky), je jasné, že systém již ve své konfiguraci napovídá, že se vytváří platforma obdobná výkonům kardiochirurga při robotických výkonech (Da Vinci) (Obr. 12). K první klinické aplikaci by mělo dojít v souvislosti s možností provedení katetrizační ablace komorové tachykardie u nemocných po prodělaném infarktu myokardu nebo dilatované kardiomyopatii.
Závěr
Nové možnosti dálkově řízené navigace při provádění srdeční katetrizace, a to včetně nových zobrazovacích technik s využitím trojrozměrné rekonstrukce srdečních oddílů - ať již s využitím MR/CT nebo virtuálních zobrazení elektroanatomickým mapováním - mohou zásadně ovlivňovat efektivnost, a zvláště pak bezpečnost, prováděných výkonů. Dovolují operátorovi orientovat se v prakticky reálných rozměrech jednotlivých srdečních oddílů a zároveň přispívají ke snazší řiditelnosti katétrů k jinak velmi obtížně dostupným, anatomicky velmi komplexním strukturám. Lze konstatovat, že tyto systémy reprezentují prakticky novou platformu v provádění katetrizačních intervenčních zákroků v kardiologii, což může ve svém důsledku vést až k možné aplikaci nových zobrazovacích systémů, kdy bude možné získávat trojrozměrný obraz v reálném čase a v současné době používaný princip integrace obrazu tak bude rychle překonán.
Je velmi důležité, že průkopníkem použití těchto doslova revolučních systémů je Česká republika, neboť systém magnetické navigace Niobe využívá již dva roky Kardiologické oddělení Nemocnice Na Homolce a systém Sensei stejnou dobu Klinika kardiologie IKEM a Kardiologické oddělení Nemocnice Na Homolce. I do budoucnosti se zdá, že tento dramatický vývoj aplikace špičkových technologií se bude odehrávat také na území ČR, kde ani ostatní pracoviště nezůstávají nijak pozadu.
O autorovi: Doc. MUDr. Petr Neužil, CSc., FESC, doc. MUDr. Miloš Táborský, CSc., FESC, MBA, MUDr. Jan Škoda, MUDr. Jan Petrů, MUDr. Lucie Šedivá, Ph. D.
Nemocnice Na Homolce, Kardiocentrum, Kardiologické oddělení
e-mail: petr.neuzil@homolka.cz
